Welcome to the Sixty-Six Wards District Profiles! I’ll be walking through the most interesting races occuring in Philadelphia and the burbs (mostly the burbs), starting with the PA House. Democrats need to pick up
20 seats to tie up the PA House. Nineteen districts currently held by Republicans nonetheless voted for Clinton; all of them are in the Philadelphia region.
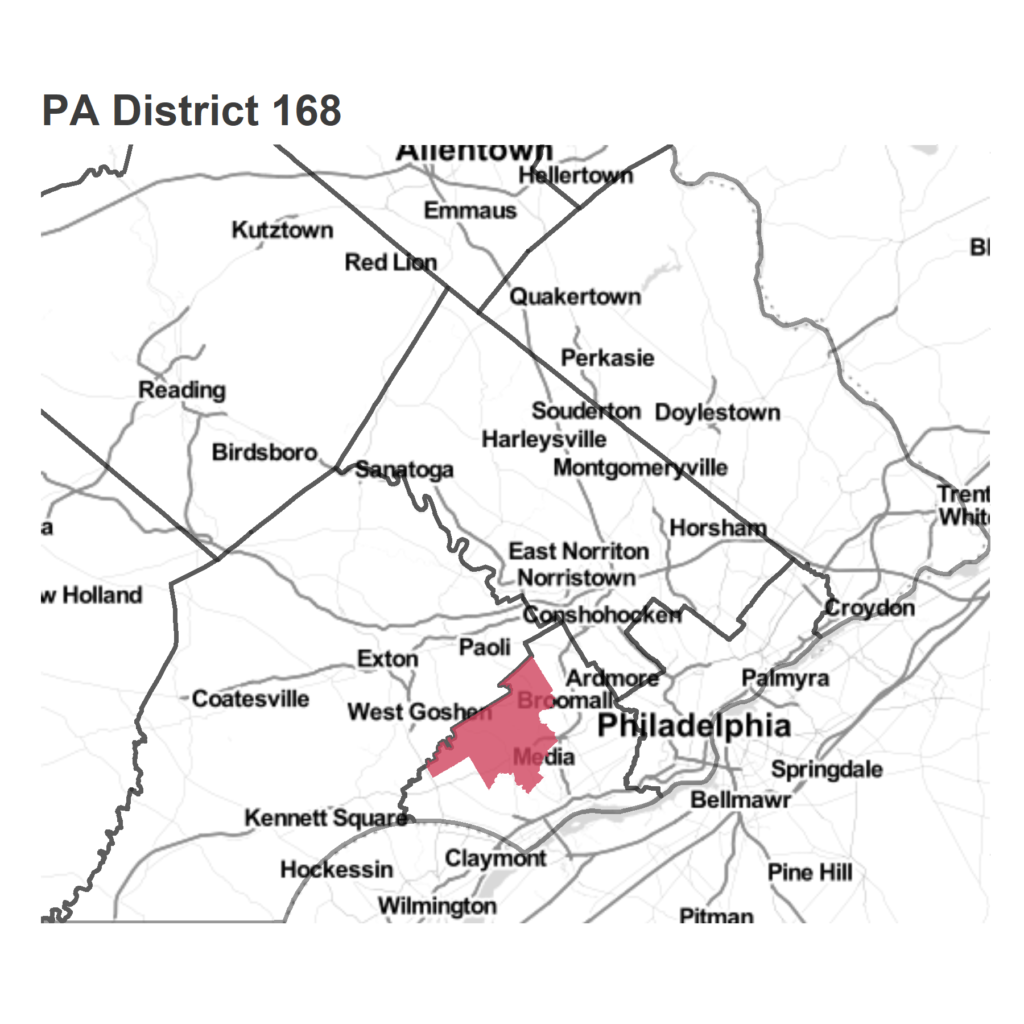
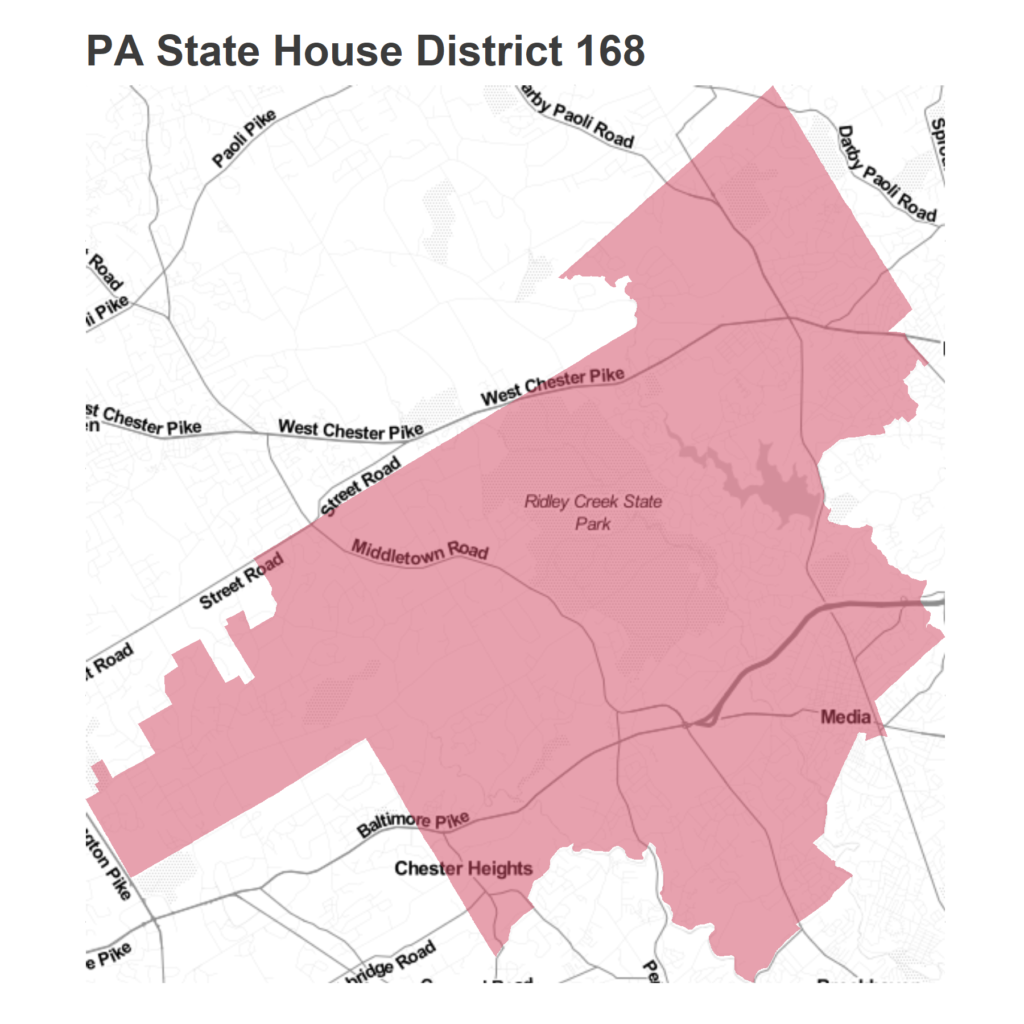
Today: Delaware County’s PA House District 168.
District 168 covers the Northeast of Delco, including parts of Media. It is represented by Christopher Quinn, a Republican who was first elected in 2016. Before that, it was represented by longtime Republican rep Thomas Killion, and has never been represented by a Democrat.
In 2016, Quinn beat Democratic challenger Diane Levy by 12 points. Clinton beat Trump by 7 among the same voters. In Special Elections since, FiveThirtyEight has calculated a 16 point swing towards Democrats nationally, which would provide a 4 point Democratic victory if it held here. Of course, Quinn won significantly in 2016 in this anti-Trump district, even in the year that Trump was on the ballot.
This year, Quinn is being challenged by Democrat Kristin Seale. She won a competitive primary by only 100 votes, and would be the first woman and first Democrat to hold the seat. She is running as a strong progressive, endorsed by the DSA and several union groups.
Election History
In 2016, the Republican Quinn won by 12 points, and won in 33 of the district’s 40 precincts.
The precincts that voted for Democrat Levy were all centered around Media, the district’s “urban” core.
Those precincts are both the densest residentially—the represented 19% of the votes—and the most racially diverse, though no precinct is less than 74% White.
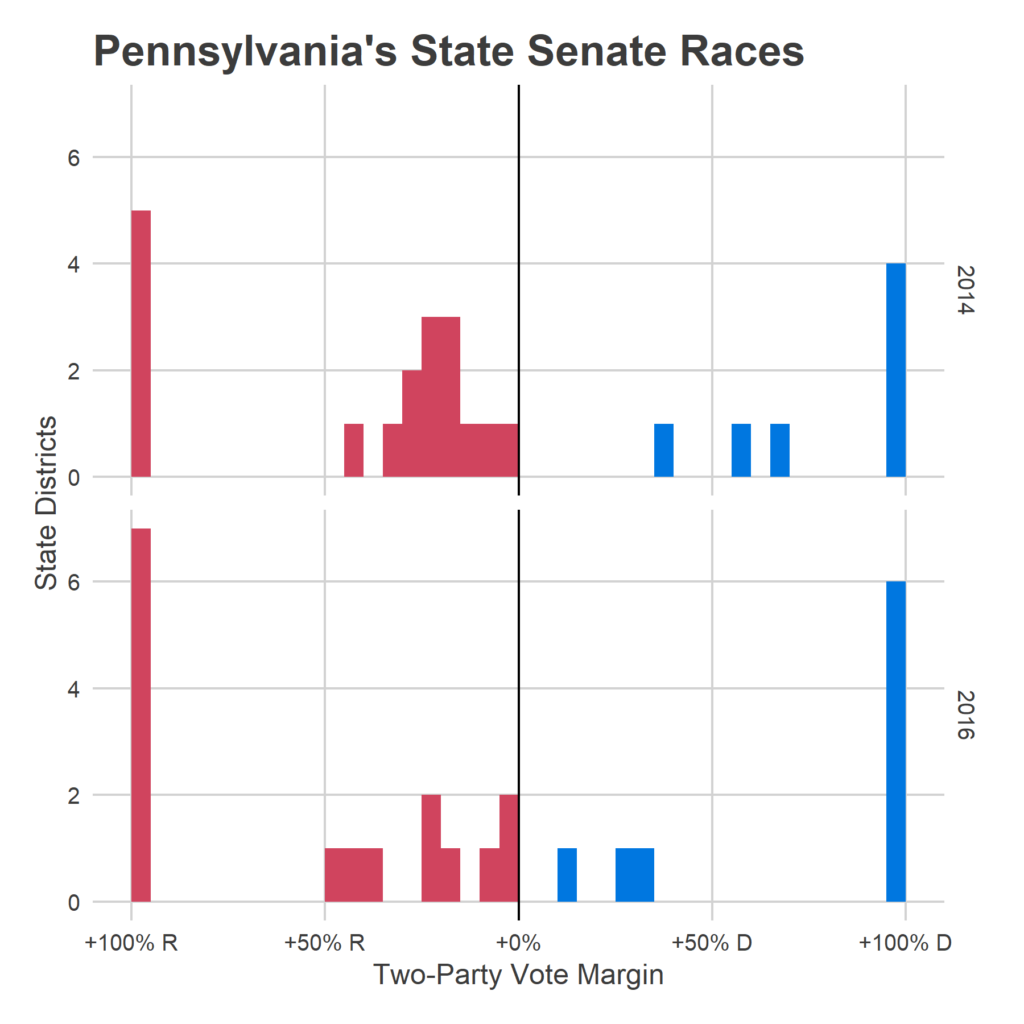
Lining up the districts by results from the 2016 in the State House race shows how dramatically Republican it was.
For Kristin Seale to win, she would need to swing those marginal precincts towards her (raise the bars) or *drastically* increase turnout in the Democratic precincts (widen the Democratic bars). The plot makes it pretty clear that just increasing turnout in Media probably won’t cut it.
The map of the 2016 Presidential race looks completely different from the State House race of the same election, with 23 of the precincts voting for Clinton:
In fact, every single precinct voted more for Quinn than they did for Trump.
Finally, how should we expect turnout to compare to 2016? Some 38,000 votes were cast in the State House race in 2016, compared to 16,000 in 2014. The Democratic precincts saw much larger jumps in turnout between elections, mirroring a longstanding rule that midterm election turnout favors Republicans. If a Blue Wave means that Democratic turnout is more like a Presidential year, the election could be hers.
There are a number of open questions that are unanswerable. The biggest is: What should we make of a district that simultaneously elected a Republican State Rep and swung hard towards Clinton, both to landslide victories in the same election? Will these Delco voters stick with their favored incumbent, especially without Trump on the ballot? Or has the intervening two years of a Trump presidency turned these voters, who already disliked Trump, against Republicans all the way down the ballot? We’ll see in November.
Sources:
Election data from the Open Elections Project
Population data from the 2016 American Community Survey 5-year estimates.
Boundaries and GIS data from election-geodata
Base maps provided by maps.stamen.com/